Locations:

New robotic system provides advantages

Advertisement
Cleveland Clinic is a non-profit academic medical center. Advertising on our site helps support our mission. We do not endorse non-Cleveland Clinic products or services. Policy
Since the inception of minimally invasive surgery, physicians have been inspired to push the limits of available technology by devising new methods and instruments.
The evolution of a single-site technique in robotic surgery has resulted in the development of a device intended specifically for use during urologic procedures appropriate for a single-port approach, including laparoendoscopic single-site surgery (LESS).
LESS has the primary goal of accelerating patient recovery and improving quality of life, but its role has yet to be determined due to inherent challenges compared with standard laparoscopic techniques.
In 2009, Cleveland Clinic’s Glickman Urological & Kidney Institute reported the first series of successful robotic single-site surgeries. We found that combining LESS with the robotic platform (RLESS) greatly enhanced our surgical capability by offering increased articulation and stability for precise suturing and dissection.
Since the publication of our initial series, multiple institutions have adopted the technique and published series of their own.
Although the da Vinci® robotic surgical system has substantially improved our ability to perform single-site surgery, it was not originally designed for this purpose. As a result, its manufacturer has developed an innovative device specifically designed for RLESS (da Vinci Sp Surgical System, Model SP999).
In contrast to the original robotic design that necessitated the use of multiple separate ports, the SP999 requires only a single port to introduce the instruments and camera.
Advertisement
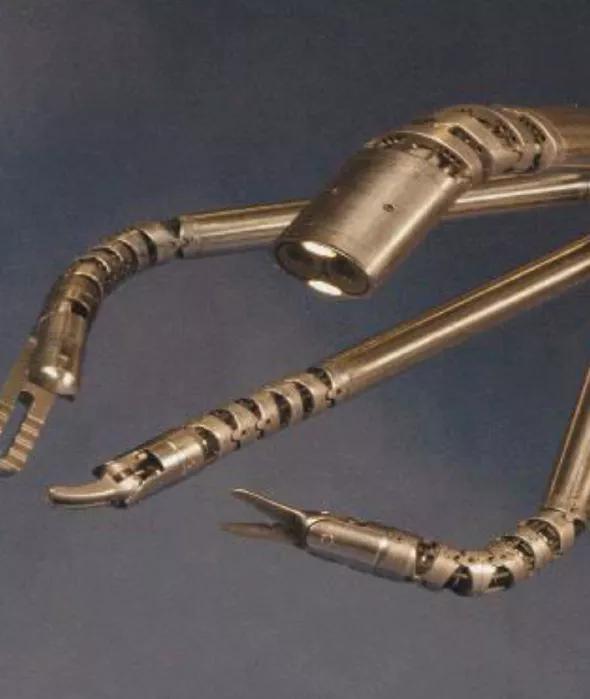
Image content: This image is available to view online.
View image online (https://assets.clevelandclinic.org/transform/f863f3b0-b86b-46ce-b2c5-6c01059a3e93/15-URL-077-Kaouk-Inset-Image-01-590pxl-width_jpg)
Figure 1. Novel robotic single-port arm. Common sheath houses two cameras for stereoscopic vision, light source, and three instruments that articulate at different levels for extended range of motion.
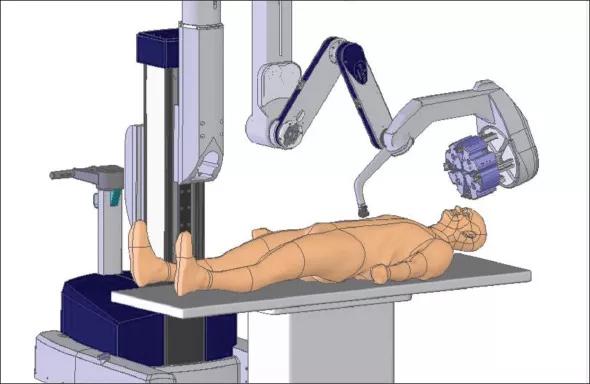
Image content: This image is available to view online.
View image online (https://assets.clevelandclinic.org/transform/94884cd5-321d-4b66-a148-b8c6a4fd2a2a/15-URL-077-Kaouk-Inset-Image-02-590pxl-width_jpg)
Figure 2. Main robotic arm can be positioned for multi-quadrant surgery without having to reposition the robot.

Image content: This image is available to view online.
View image online (https://assets.clevelandclinic.org/transform/bf7ed280-4d3d-42d5-81c1-91dcb9cae65f/15-URL-077-Kaouk-Inset-Image-03-590pxl-width_jpg)
Figure 3. Intraoperative image of robotic single-port radical prostatectomy, showing robot docked to patient umbilicus.
Our institution was one of the first to utilize the new single port robotic system in a clinical series. We performed single-site robotic surgery using this novel technology in 19 patients, including 11 who underwent single-site robotic prostatectomy and eight who underwent single-site robotic nephrectomy. (Four of those eight patients underwent partial nephrectomy.)
There were no conversions to open, contemporary robotic or laparoscopic technique. Functional outcomes during a three-year follow-up period were comparable to those using standard techniques.
This new single-port robotic technology represents a step forward in minimally invasive surgery. It is unique as it allows for intracorporeal triangulation while eliminating the instrument clashing that is observed with other methods of single-site surgery.
Dr. Kaouk is Director of Cleveland Clinic Glickman Urological & Kidney Institute’s Center for Robotic and Laparoscopic Surgery and is the Urological & Kidney Institute’s Vice Chair for Surgical Innovations. He is Professor of Surgery at Cleveland Clinic Lerner College of Medicine.
Advertisement
Advertisement

Pediatric urologists lead quality improvement initiative, author systemwide guideline

Fixed-dose single-pill combinations and future therapies

Reproductive urologists publish a contemporary review to guide practice

Two recent cases show favorable pain and cosmesis outcomes

Meta-analysis assesses outcomes in adolescent age vs. mid-adulthood

Proteinuria reduction remains the most important treatment target.

IgA nephropathy is a relatively common autoimmune glomerular disease that can be diagnosed only by biopsy

Oncologic and functional outcomes are promising, but selection is key